
ヒューマノイドロボットの展望
当日使った写真(ロボットの写真)のいくつかが文末にあります。
是非ご覧下さい。
ロボットの実用例
産業用のロボットは既にかなり普及していますが、最近それが工場の外に出て人間環境に入るロボットが出始めています。SONY、ホンダ等多くの企業や機関がこのロボット開発を行なっており、中でもSONYのAIBOは家庭用の最初のロボットとして話題を呼びマスメディアを通じて一般にも知られることとなりました。これらの中には、PHSを使用して遠隔操縦で買い物をさせたり、ロボットに家電製品のリモコンを持たせてロボットと対話することで家の中の家電の操作をさせる等、高い実用性が見込まれるものもあり、またATRが目指している様に所謂「プラットフォーム」としてロボットを使うことも注目されています。
早大ヒューマノイド研究所(HRI)とその歴史
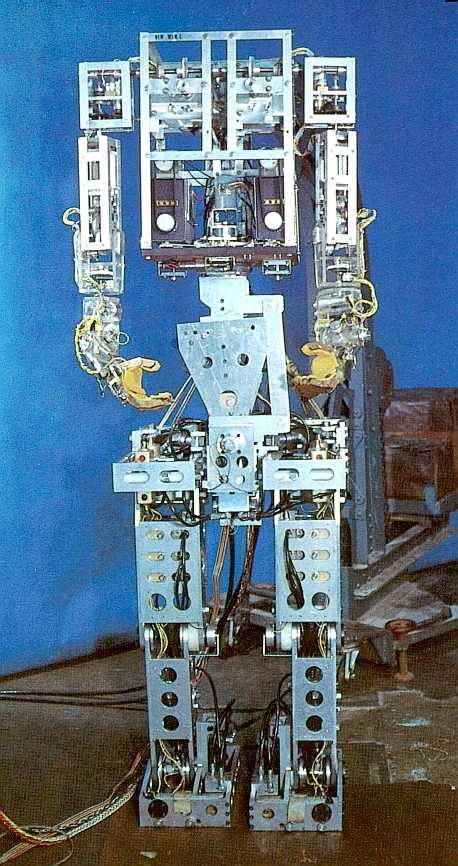
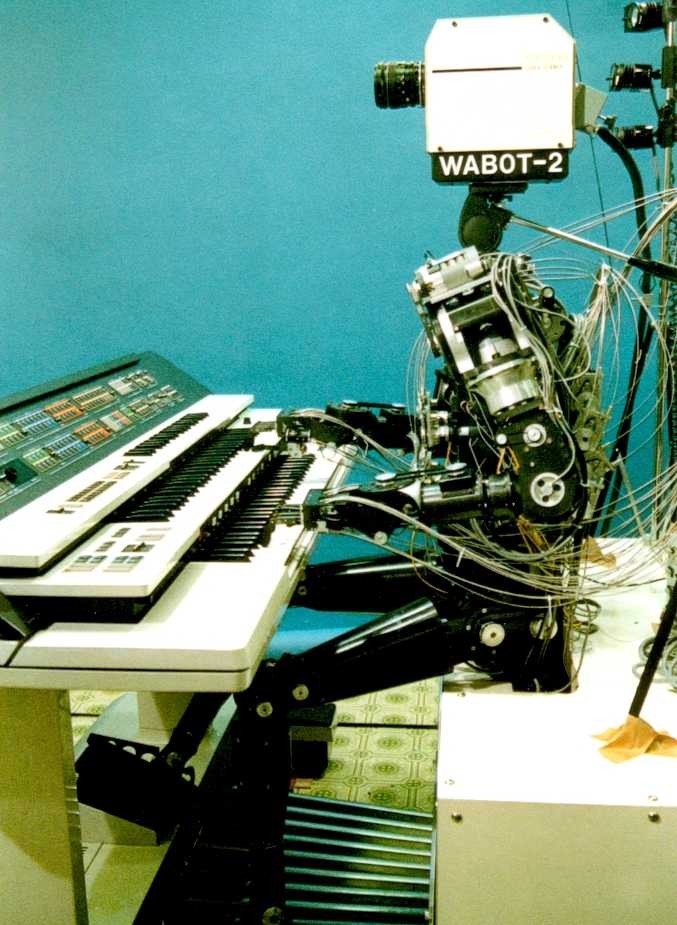
早大の加藤教授が1970年代初期から二足歩行ロボットの開発に心血を注いで来られ、1973年に当時無理だと言われた二足歩行(人の命令によって歩いてコップを取って来る)を可能にし、10年後には譜面を読んでエレクトーンを演奏出来る様になり、それが筑波万博ではN響とロボットとのアンサンブル演奏という形で紹介されました。加藤教授が亡くなられた後、弟子にて遺志を継ぎ研究を続けて、2000年4月に早大から独立した研究所として認められました。これがHRIで、現在7人の専任教授、4人の客員教授の他100名を超える研究者がおり、世界最大の人型ロボットの研究組織となっています。また多くの企業、官公庁のサポートを得て研究を行なっているところです。
人型ロボットについて
<何故「人型」ロボットの研究が必要なのか>
何故、わざわざ人の形をしている必要があるかというと以下のことが挙げられます。
・人の機能全体は無理にしても部分的に人の機能を持たせて、人の機能を解明する。
・ロボットによって人の動作を定量化するツールが出来る。人のモデルをベースに、それを演繹して、ものの設計が出来る。
・21世紀はPersonalロボットの世紀が来るであろう。その準備を行なう。
・「人間」という究極の目標に少しでも近づけるという所謂「Grand Challenge」としての意味。
二足歩行ロボット
<二足歩行のメカニズムと複雑さ>
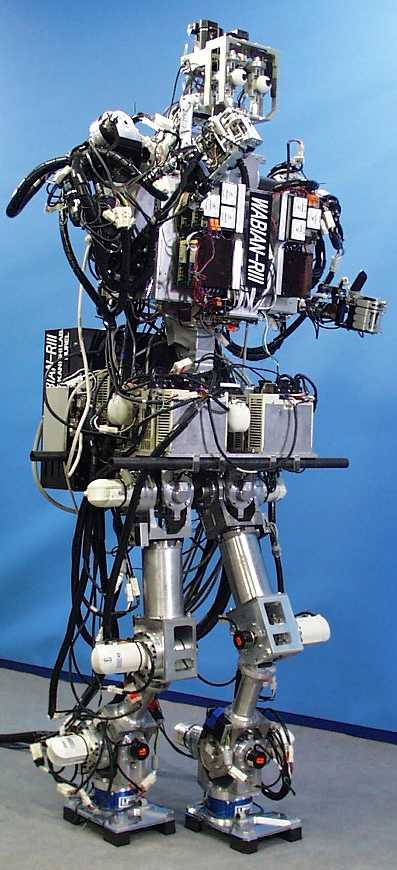
早大では10数年前に階段の上り下りをロボットがやっていましたが、一方義足の開発をしているグループもいました。その様に人の為の機器開発と人型ロボットの開発が両輪の様に行われて来た訳です。また例えばロボットにとって関節の数がいくつあるかが機能の複雑さの一つの指標となりますが、産業用ロボットが6個程度なのに対し、経産省の助成により開発した早大のWABIANでは43個もあります。この様な複雑なものをどう倒れずに動かすかについては、30年前にユーゴスラビアの学者ヴコブラトヴィッチ氏の理論が基礎となっており、これを故加藤教授がロボットに使おうと考えました。現在のホンダやSONYのロボットも基本的な概念はこの理論が発展したものです。関節の数に戻ると、関節数の3乗に比例して計算量が増えるので大変な作業となりますが、関節数が増えれば歩行に感情表現が出来たりもします。また、以前HRIが経済産業省から1億円の補助をもらって作ったロボットにキャンディーボックスを運ばせて見ましたが、股関節を左右に動かすモーターを予算の関係で省略したところ、肩をゆすって歩くゴリラの様な歩き方となりました。実際に猿の股関節は左右に開きにくいとのことで、股関節の左右動を制限すると猿もロボットも同様のバランスの取り方をする様になるという例です。
- ロボットの歩行例を映像で紹介 -
<二足歩行ロボットの例、SONYのSDR-3X>
早大が共同で開発して来たSONYのSDR-3Xを例に取ります。このロボットは音声で命令をすれば、それを認識しボールを見つけて蹴る、それがゴールに入れば万歳することも出来ます。これはコンピューター2台を積んでいますが、コンピューターも今の性能は昔のスーパーコンピュータークラスのものが非常にコンパクトになっており、オンラインで音声命令や画像を認識して動くことが出来る様になったし、ロボットの筋肉にあたるアクチュエーターシステムについてもSONY独自でモーターと制御装置を開発して本ロボットに使用している等 非常に優れたロボットとなっています。
― SDR-3Xの動きを映像で紹介 -
二足歩行以外のロボット
<フルートを吹くロボット>
フルート演奏というのは特異的な人間の技術と言われています。この演奏について著名な演奏家の若松氏の力を借り、General Positionという考えををロボットに移植することによりロボットがフルートを美しく吹くことが可能になりました。これには演奏技術の移植ということと同時に「良い音」という概念を数式に表すことも必要で、それも大変でした。
- 外務省の助成を受けて,ベルリン市に招待されてコンサートを演じた場面を映像で紹介 -
ロボットはシステム技術であり、一つ一つの部品が良ければ良いものが出来ます。このロボットについても特殊樹脂部品を修猷時代の友人の会社から提供してもらったり、色んな会社から協力してもらっています。
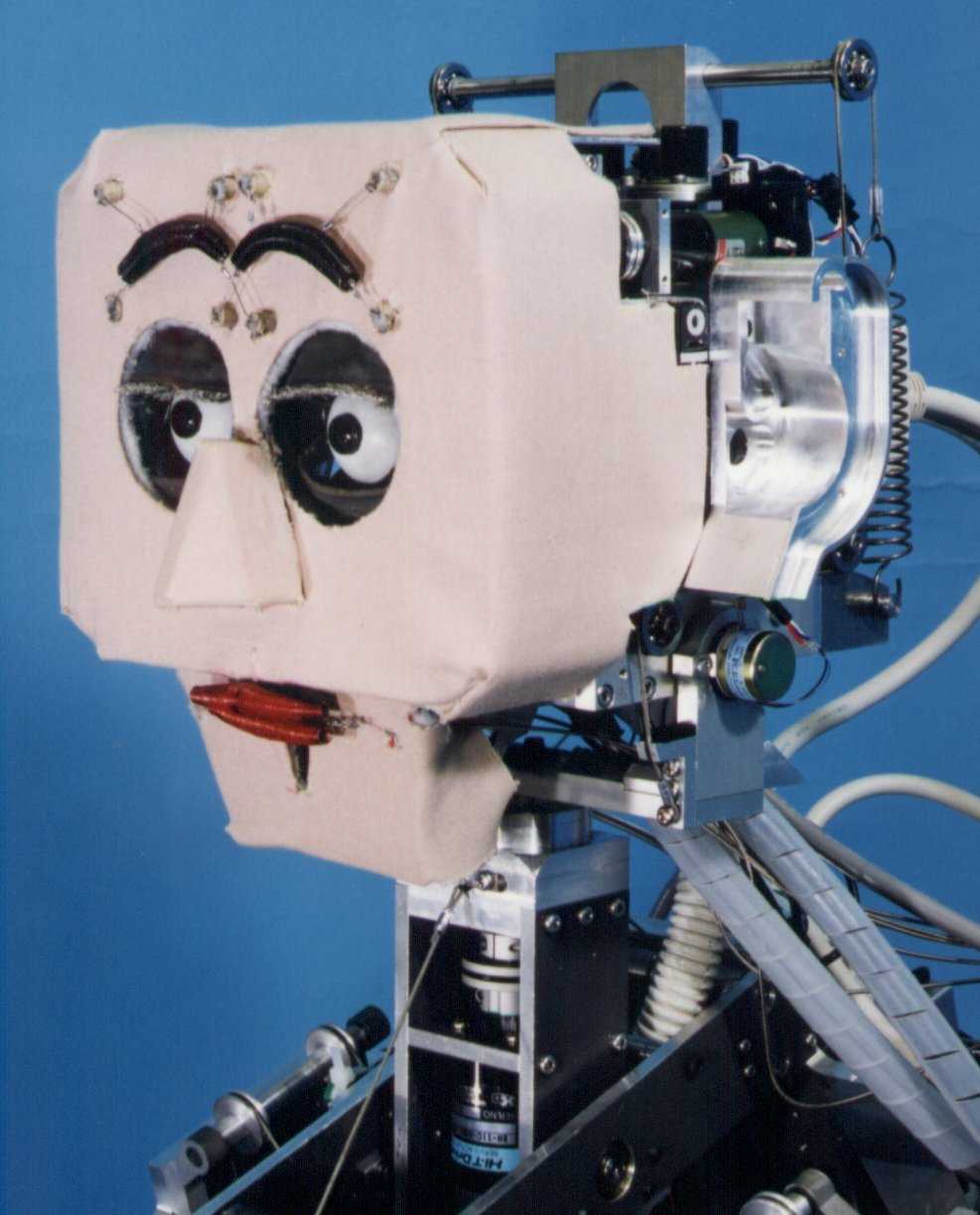
<顔のロボット>
パーソナルロボットである為には、専門家であるプログラマーに頼らずにロボットが自身を再プログラム出来る必要があります。つまりは相手となる「人」の意図や意思を取り出してそれに合った行動をすることが求められ、そこには人とロボットのコミュニケーションが必要となる訳です。従ってロボットの方も人の形をしていた方が良いし、また人間の五感や表現が集中している「顔」をロボットに持たせることが意味を持つことになります。脳の機能は単純化すればReflex、Emotion、Intelligenceに分けられるますが、この中でReflexとIntelligenceについては相当のレベルで工学者が研究をして来て、既にかなりのところまでエンジニアリングがコミットしている。ところがEmotionについては工学が殆ど入り込んでいないので早大の心理学研究室と共同して研究しています。快・不快、覚醒・不覚醒、確信・不確信という3次元の仮想的な心理的空間をロボットに持たせ,「青い色が好き」や「アルコールが嫌い」というような感受性という個性のフィルターを通すと、その通過領域の違いによって怒りや恐れが現れます。またそれらをどれだけ表に出すかというのも「個性」であり、それら感受性と表出性のペアが全体のパーソナリティと捉えて研究しているところです。
- 三半器官と同じメカニズムを搭載したロボットの覚醒、目と首の動きの映像 -
これを利用して条件付け学習やパーソナリティと心の軌跡についての研究も行なっています。
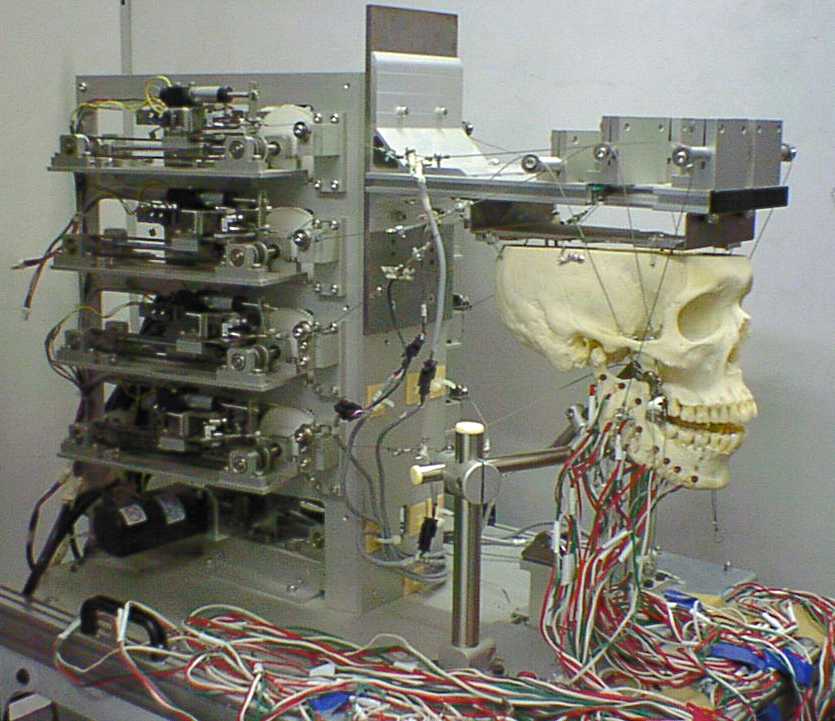
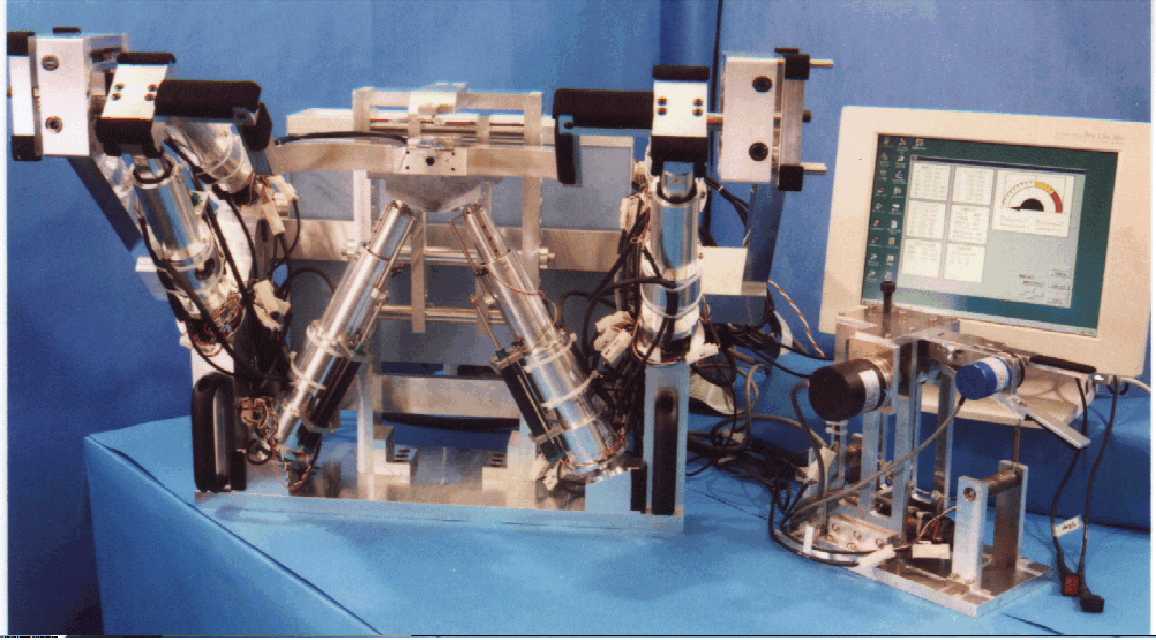
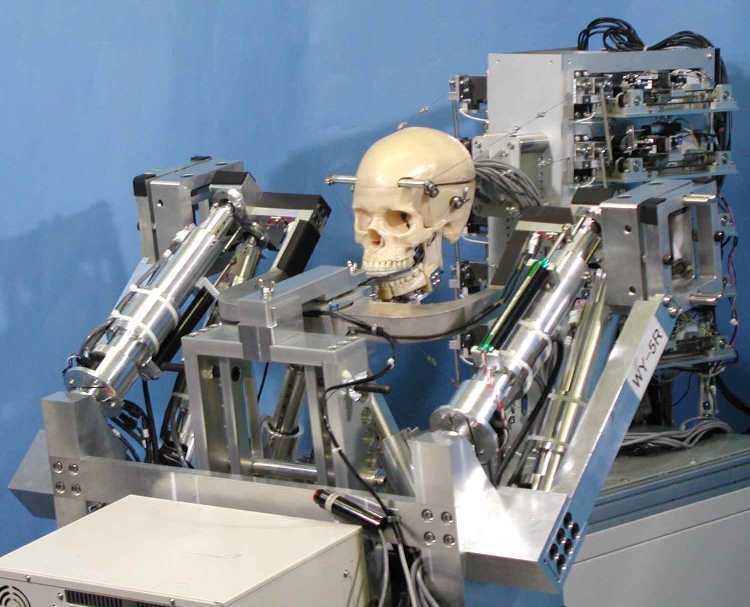
<ものを噛むロボット>
文科省の科研費という助成により,ものを噛むロボットについて東京医科歯科大学、昭和大学等と研究をしてきました。
顎関節症の治療についても山梨医科大学と研究を進めていますが、そこの大西先生も修猷館の先輩でした。顎がまっすぐ開かない人に対してロボットを使用して患者の疼痛を減らして治療が出来、しかも遠隔で治療が出来るので早大に患者が来て山梨医大から遠隔治療を行なってもらうことも出来ます。ロボットでロボットを治療することや治療の記録を全て取り込むことにより仮想的な患者を作り出して医療の研究やレベルを上げることもチャレンジしています。食品工学の面では噛み心地をロボットで定量化することを目標に和洋女子大学とも研究を進めています。
<しゃべるロボット>
文科省のCRESTという助成により,人間の発生の数理的メカニズムを解明するため,ヒトの肺と同じ容積の肺機構,特殊ゴムでできた声帯や舌機構,鼻腔,歯,唇など,ヒトの口腔メカニズムを模して、実際に発声を行うロボットをNTTと共同研究しています。
- その最新例の映像 -
最後に
人型ロボットの研究が日本で独特な面の一つとして、欧米では神が人を創ったのに人が人を創ることに対する抵抗があり、場合によっては研究者がカルト宗教から脅迫を受けることもありますが、日本ではそれがない。その意味でも人型ロボットについては、日本では諸外国の制約から離れた技術分野が形成出来るかもしれないとも考えているところです。